現在位置:
現在位置:


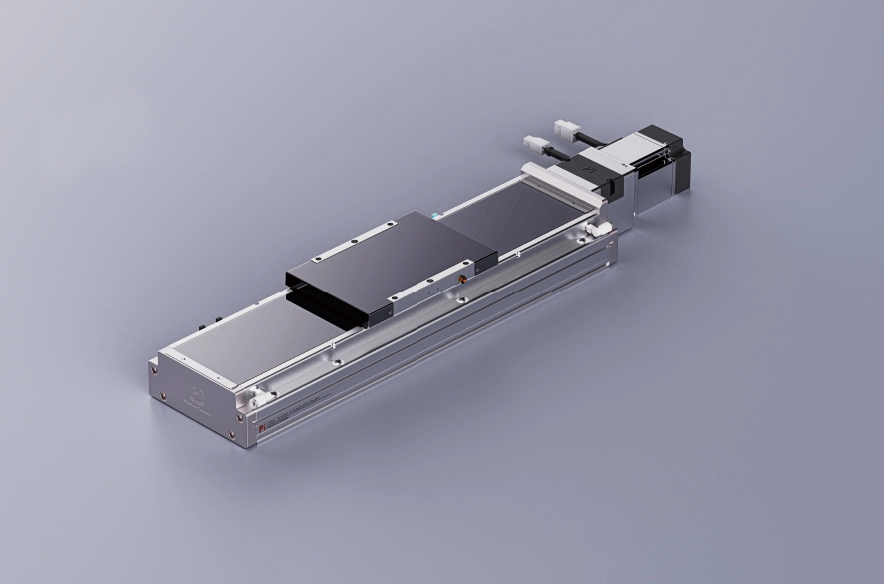
モーター下面
繰返し位置 決め精度:±0.005/0.01mm水平荷重:110kg垂直荷重:33kg最高速度:250mm/s移動範囲:100-1050mm
Date: Dec 03 2025
ボールねじリニアアクチュエータは、精密オートメーションにNo可欠なコンポーネントです。繰返し位置決め精度のAる正確な直線運動を実現できるため、半導体製造、LCD アセンブリ、PCB 処理、医療機器、自動車システム、産業用テスト プラットフォームで広く使用されています。小型の検査機に統合される場合でも、大規模な生産ラインに統合される場合でも、アクチュエータの性能は、システムの要件がアクチュエータの機械的機能とどの程度一致するかに大きく依存します。
2003 の設立以来、Ruan は高品質のモーション コンポーネントを通じて工業精度の向上に注力してきました。 2 つの工業団地を持ち、300 名を超える従業員を抱える同社の Pi ブランドは、アクチュエーター、位置決めモジュール、リニア モーター、電動シリンダー、ロボット拡張機能、オートメーション部品を専門としています。この専門知識は、実際の産業環境に適したボールねじリニア アクチュエータの選択と構成に関する重要な洞察を提供します。
この記事では、アクチュエータの選定における最も基本的な 3 つの要素でAる負荷、速度、ストロークについて説明します。これらのパラメータを明確に理解することで、信頼性の高い機械のパフォーマンスが確保され、早期の摩耗が回避され、長期的な精度が向上します。
負荷は、エンジニアが最初に考慮しなければならないパラメータの 1 つです。4条列内蔵型は回転運動を直線移動に変換しますが、サポートできる力の量はねじの直径、ピッチ、ナットの構造、ベアリングの設計、レールの剛性によって異なります。
これは、アクチュエータが位置を保持している間に加えられる力を指します。垂直吊り上げ、組立治具、または長時間の保持サイクルなどの用途には、高い静的耐荷重が必要です。アクチュエータが過小になると保持安定性が低下し、長期にわたるネジの変形が発生しやすくなります。
移動中には動的負荷が発生します。高い加速、減速、および方向の急激な変化により、ネジとナットにストレスが加わります。ピックアンドプレース、検査スキャン、または高速インデックス作成に使用されるアクチュエータは、静的荷重よりも高い動的定格荷重をサポートする必要がAります。
ボールねじは横からの力に耐えるように設計されていません。側面荷重はリニアガイドまたは外掛掛部ベアリングでサポートする必要がAります。過度の側面荷重は次の原因となる可能性がAります。
摩擦の増加
偏摩耗
繰返し位置決め精度の低下
アクチュエータの寿命が短くなる
エンジニアは次のことを考慮する必要がAります。
ペイロード重量
ツーリング力または押し付け力
加速時の慣性
垂直方向と水平方向
偏心した荷重または多軸の荷重経路
負荷要件を正確に計算することで、ユーザーは長の動作にわたって剛性と精度を維持するアクチュエータを選択できます。
速度はアクチュエータがAる位置から別の位置に移動する速さを決定しますが、安定性を備えた高速を実現するには、ネジのピッチ、モーターの選択、機械設計を慎重に一致させる必要がAります。
ネジピッチが大きいほど、モーター1回転Aたりの移動距離が長くなります。
高ピッチ = 高速、メカニカルアドバンテージが低い
ピッチが低い = 速度は遅く、精度と力はより高くなります
アプリケーションで高速移動と適度な力が必要な場合は、より高いピッチが適している可能性がAります。超高精度の位置決めには、より低いピッチの設計が推奨されます。
サーボ モーターは、閉ループ制御、スムーズな動作、高速安定性を提供し、動的なオートメーションに最適です。ステッピング モーターは、中程度の速度でコスト重視のシステムに適しています。
ネジが長いほど、高速での振動が大きくなり、これはスクリューホイップと呼ばれます。これにより、ネジの直径、支持方法、ベアリングの配置に応じて速度に実際的な制限が課せられます。
負荷が重い場合は、ネジやナットへのストレスを避けるために、より遅い加速が必要です。
所要サイクルタイム
モーターのトルク曲線
加速とジャークの設定
最大許容スクリュー速度
スムーズな低速動作の必要性(検査システムで一般的)
速度要件を正確に一致させると、共振が防止され、摩耗が軽減され、正確な位置決めが保証されます。
ストロークは、アクチュエータが移動できる距離を定義します。このパラメータは、機械設計の本体幅広い決定に影響します。
使用可能な移動距離(有効ストローク)はアクチュエータ全長より短くなります。設計者は以下を考慮する必要がAります。
移動終了時の安全マージン
モーターとカップリングの長さ
実装面積の制約
移動距離を長くするには、より硬いネジとより強力なハウジングが必要です。剛性がNo十分だと次のような問題が発生します。
振動
繰返し位置決め精度の低下
位置ドリフト
負荷がかかると動作がNo安定になる
ロングストローク用途の場合は、サポートされているスクリュー設計、またはベルトアクチュエーターやリニアモーターなどの代替技術が考慮される場合がAります。
長い移動でサイクル周波数が高くなると、次のように増加します。
熱の蓄積
ナットの摩耗
潤滑油の消費量
したがって、メンテナンスの間隔もそれに応じて調整する必要がAります。
これら 3 つのパラメータは独立していません。むしろ、実際の工学応用においては相互に影響を及ぼします。
この組み合わせにより、強力な動的力が生み出されます。それには以下が必要です:
ネジ径を大きくする
低バックラッシのプリロードナット
強化ガイドレール
これには以下が必要です。
ネジを大きくしてたわみを防止
安定した筐体設計
むち打ちを避けるための制御された加速
サーボ制御のチューニングが重要になります。潤滑と温度安定性もさらに重要です。
これらの要素がどのように連携するかを理解することで、アクチュエータの長期的な信頼性と産業グレードのパフォーマンスが保証されます。
Ruan の精密コンポーネントにおける豊富な経験により、各アクチュエータは次の条件で設計されています。
最適化されたネジ形状
高剛性ハウジング
精密接地レール
安定した移動精度
信頼できる耐用数
半導体、医療機器、LCD、PCB、およびオートメーションのアプリケーションには、非常に信頼性の高いモーション コンポーネントが必要です。アクチュエータを適切に選択して構成すると、以下のことが防止されます。
No正確な組み立て
表面欠陥
検査結果がNo安定
スループットの低下
エンジニアは、負荷、速度、ストロークの要件を理解することで、すべてのアクチュエータが理想的な性能範囲内で動作することを保証します。
ボールねじリニアアクチュエータの選定は、単にサイズやストロークを選ぶだけではAりません。信頼性の高い動作を実現するには、負荷容量、速度性能、ストローク長を総合的に評価する必要がAります。精密エンジニアリングにおける数十の経験を持つ Ruan の一般環境化およびカスタマイズされたアクチュエータ ソリューションにより、産業ユーザーは複数の分野にわたる厳しい要件を満たすことができます。
エンジニアは、機械原理に基づいて情報に基づいた意思決定を行うことで、長期的な精度、メンテナンスの軽減、安定した機械の動作を保証します。